r00t.cz
GRAW DFM-06 Radiosonde decoding
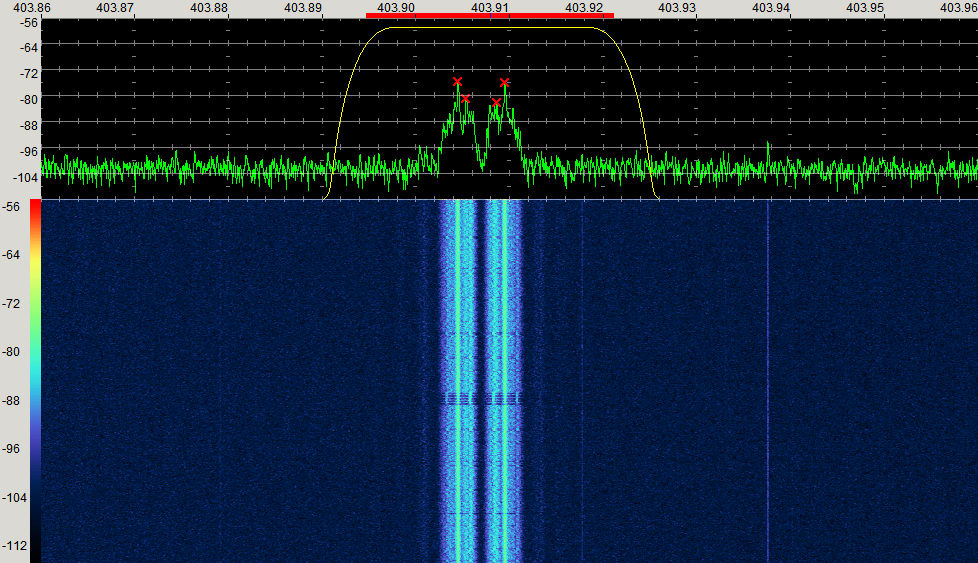
DFM-06 signal spectrum received by SDR
Signal characteristics
Sonde is using 2500Bd FSK modulation with MANCHESTER encoding.
Interleaving is used for error spreading across frame and
ECC code for data validation and error correction.
There are two sonde types: with and without GPS. Sonde without GPS fills
position portion of frame with zeroes.
Typical sound of DFM-06 with GPS (WAV 90kb)
Can be received using FM/NFM radio without discriminator output. However
not that oscillator in sonde is unstable and will drift up to 50KHz off initial
frequency. AFC or wide FM can be used to compensate.
Transmitted data
PTU part consists of 24bit values, 2 channels sampled every second, 4 channels sampled every 4 seconds.
GPS sends time, lat,lon,altitude,deltas for these values and frame number.
There is also usually unused block of telemetry for external sensors (like ozone mesurement).
Decoder
Currently have program that performs signal decoding and outputs frames to disk.
Additional script converts it to the readable format and KML files for map display.
When complete, realtime decoder will be available here for download.
Results
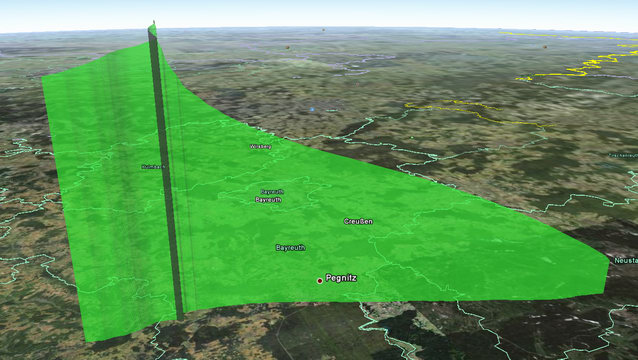
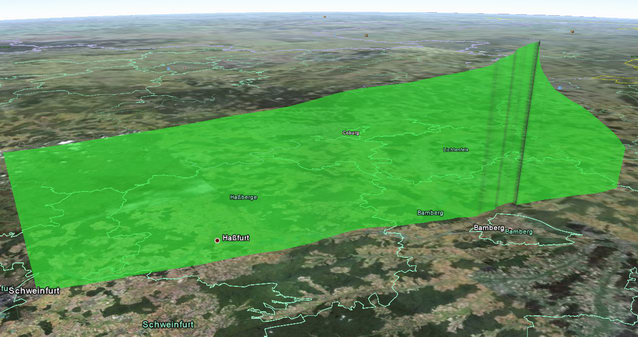
Here are two decoded flights as KML files for Google Earth. Click images to download.
Both flights heard to 3-5km height. Not bad, as they were ~250km away from me.
20110816 1829z 403.930
20110816 2352z 403.900
All content on this webpage is published for personal use only.
You are using any software downloaded from this page at your own risk. Some software may be illegal to use in your country.
© r00t 2009-2021 (email: r00t@<this domain>)